1.
(2024高二下·湖北期中)
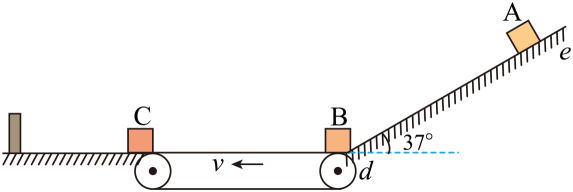
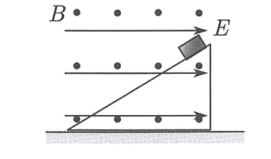
如图所示,长为

的水平传送带以

的速度匀速转动,紧靠传送带两端的水平面上各静止一个物块 B和C,

。在距传送带左端

的水平面上放置一竖直固定弹性挡板,物块与挡板碰撞后会被原速率弹回,右端有一倾角为

且足够长的粗糙倾斜轨道de,斜面底端与传送带右端平滑连接。现从距斜面底端

处由静止释放一质量

的滑块A,一段时间后物块 A与B发生弹性碰撞,碰撞时间忽略不计,碰撞后 B滑上传送带, A被取走。已知物块B、C与传送带间的动摩擦因数

, 与水平面间的动摩擦因数

, 物块A与斜面间的动摩擦因数

, 物块间的碰撞都是弹性正碰,不计物块大小,g取

。

,

。求:






 B .
B .  C .
C .  D .
D . 
 粤公网安备 44030702000055号
粤公网安备 44030702000055号

 VIP申请
VIP申请
 团体组卷申请
团体组卷申请
