二一教育旗下产品
网站首页
帮助中心
视频帮助
购买服务
VIP服务
团体组卷服务
激活VIP
旗下产品
21世纪教育网
校网通
校本资源库
数字化校园
二一排课
二一书城
二一阅卷
二一在线备课
二一教育众包网
登录
注册
试题
试卷
试题
领取新人礼包
试卷征集
VIP申请
团体组卷申请
高中物理
小学
语文
数学
英语
科学
道德与法治
初中
语文
数学
英语
科学
物理
化学
历史
道德与法治
地理
生物学
信息技术
历史与社会(人文地理)
社会法治
高中
语文
数学
英语
物理
化学
历史
思想政治
地理
生物学
信息技术
通用技术
首页
章节选题
知识点选题
智能组卷
章节智能组卷
知识点智能组卷
细目表组卷
试卷库
同步专区
备考专区
高考专区
专题特供
校本题库
当前位置:
手动组卷
/
高中物理
/
按知识点
选择知识点
最新上传
最多使用
过滤已用
过滤组卷已使用过的试题
过滤无解析试题
+ 选择本页全部试题
共计
--
道题
1.
(2024高三下·雅安模拟)
水平地面上放置有如图所示的装置,光滑竖直杆上、下端分别固定有挡板和底座,且套有可上下移动圆盘。一轻质弹簧下端固定在底座上,上端位于
A
处。推动圆盘将弹簧压缩至
处后由静止释放,圆盘运动到
处与挡板发生完全非弹性碰撞(作用时间极短),带动竖直杆和底座一起向上运动,上升
时速度减为零。已知圆盘质量
, 竖直杆、挡板和底座总质量
,
A
、
间距离
,
A
、
间距离
, 重力加速度
取10m/s
2
, 不计空气阻力和圆盘厚度。求:
(1) 圆盘与挡板碰撞前瞬间的速度大小
;
(2) 释放圆盘瞬间弹簧中储存的弹性势能
。
答案解析
收藏
纠错
+ 选题
1.
(2024高三下·雅安模拟)
2022年,苏翊鸣夺得北京冬奥会单板滑雪男子大跳台冠军,实现了中国单板滑雪冬奥会金牌零的突破,并成为中国最年轻的冬奥会冠军。观众用手机连拍功能拍摄运动员从起跳到落地全过程,合成图如图所示。忽略空气阻力,且将运动员视为质点,则该过程中运动员( )
A .
做匀变速曲线运动
B .
速度变化越来越快
C .
在最高点的速度为零
D .
机械能先增加后减小
答案解析
收藏
纠错
+ 选题
1.
(2024高三下·成都模拟)
如图所示,在竖直向下的匀强磁场
B
中,将一根水平放置的金属棒
ab
以某一水平速度
抛出,金属棒在运动过程中始终保持水平且未离开磁场区域,不计空气阻力,下列关于金属棒在运动过程中的说法正确的是( )
A .
机械能保持不变
B .
感应电动势越来越大
C .
a
点电势比
b
点电势高
D .
所受重力的功率保持不变
答案解析
收藏
纠错
+ 选题
1.
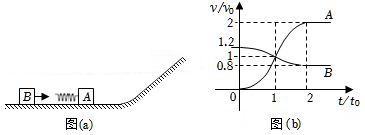
(2024高三下·成都模拟)
如图(a),一质量为m的物块A与轻质弹簧连接,静止在光滑水平面上:物块B向A运动,
时与弹簧接触,到
时与弹簧分离,第一次碰撞结束,A、B的
图像如图(b)所示。已知从
到
时间内,物块A运动的距离为
。A、B分离后,A滑上粗糙斜面,然后滑下,与一直在水平面上运动的B再次碰撞,之后A再次滑上斜面,达到的最高点与前一次相同。斜面倾角为
,与水平面光滑连接。碰撞过程中弹簧始终处于弹性限度内。求
(1) 第一次碰撞过程中,弹簧弹性势能的最大值;
(2) 第一次碰撞过程中,弹簧压缩量的最大值;
(3) 物块A与斜面间的动摩擦因数。
答案解析
收藏
纠错
+ 选题
1.
(2024高三下·成都模拟)
如图所示,绝缘轻绳穿过有光滑孔的带电小球A,绳两点
P
、
Q
固定,整个空间存在匀强电场小球静止时,轻绳绷紧,
AP
水平、
AQ
竖直,下列说法中正确的是( )
A .
匀强电场方向水平向右
B .
球受到的电场力与重力大小相等
C .
P
缓慢竖直向上移动少许,绳中张力增大
D .
Q
缓慢水平向右移动少许,球的重力势能增大
答案解析
收藏
纠错
+ 选题
1.
(2024高三下·成都模拟)
光滑的水平面上停放着质量
m
C
=2kg的平板小车C,C的左端放置质量
m
A
=1kg的物块A,车上距左端
x
0
处(
x
0
小于车的长度)放置质量
m
B
=3kg的物块B,物块A、B均可视为质点,它们与车面间的动摩擦因数分别为
μ
A
=0.3、
μ
B
=0.1,开始时车被锁定无法运动,物块A以
v
0
=9m/s的水平初速度从左端开始正对B运动,重力加速度
g
=10 m/s
2
。
(1) 若
x
0
=7.5 m,求A开始运动后经过多长时间与B发生碰撞;
(2) 若
x
0
=7.5 m,A与B发生弹性正碰,求A停止运动时距车左端的距离;
(3) 改变
x
0
的值,A运动至B处与B发生弹性碰撞后立即解除对车的锁定,此后A与B都刚好没从车上掉下,求平板车的长度。
答案解析
收藏
纠错
+ 选题
1.
(2024高三下·成都模拟)
从地面上将一物体竖直向上抛出,物体运动过程中受到恒定大小的空气阻力作用,其上升过程中动能与重力势能随上升的高度变化的图像如图所示,则根据该图像可以求出( )
A .
物体落回地面时的动能
B .
物体上升到最高点的机械能
C .
物体上升最大高度
D .
物体从抛出至落回抛出点所用的时间
答案解析
收藏
纠错
+ 选题
1.
(2024高三下·湖北模拟)
如图所示,一顶角为120°的“∧”型光滑细杆竖直放置,顶角的角平分线竖直。质量均为
m
的两金属球套在细杆上,高度相同,中间用水平轻弹簧连接,弹簧处于原长状态,劲度系数为
k
。现将两小球同时由静止释放,小球沿细杆下滑过程中,弹簧始终处于弹性限度内。已知弹簧形变量为
x
时,弹簧的弹性势能
重力加速度为
g
, 下列说法正确的是( )
A .
两小球下滑过程中,两小球的机械能守恒
B .
弹簧的最大拉力为
C .
小球在最高点和最低点的加速度大小相等
D .
小球的最大速度为
答案解析
收藏
纠错
+ 选题
1.
(2024高三下·湖北模拟)
皮带式传送带是物料搬运系统机械化和自动化不可缺少的组成部分。为研究物块在传送带上的运动,建立如图所示的物理模型。竖直平面内有一倾斜的光滑直轨道
AB
, 其下方右侧放置一水平传送带,以恒定速度
v
0
=4m/s逆时针转动,转轮半径
, 转轮最高点离地面的高度
直轨道末端
B
与传送带左端平滑相切。现将一质量
的小物块放在距离传送带高
h
=3.2m处静止释放,小物块从
B
端运动到传送带左端时,速度大小不变,方向变为水平向右,结果小物块恰好从传送带右端最高点
C
点水平飞出,已知小物块与传送带间的动摩擦因数
μ
=0.5, g取
(1) 求传送带两转轴间距
L
;
(2) 若其他条件不变,传送带改为顺时针转动,小物块从传送带右端
C
点飞出后受到的空气阻力始终与速度成正比,比例系数。
方向始终与运动方向相反,经时间
最终落到水平地面上的
D
点, 测得
C
、
D
水平间距0.8m。求∶
①小物块从传送带
C
点飞出的速度大小;
②小物块落到水平地面上
D
点的速度大小;
③小物块飞出后克服空气阻力做的功。
答案解析
收藏
纠错
+ 选题
1.
(2024高三下·湖北模拟)
如图甲所示,两个半径为
R
的竖直固定的绝缘光滑
细圆管道与粗糙水平地面
AB
在
B
点平滑相切,过管道圆心
的水平界面下方空间有水平向右的电场,记
A
点所在位置为坐标原点,沿
AB
方向建立
坐标轴,电场强度大小随位置
变化如图乙所示。质量为
、带电量为
的小球P静止在
A
点,与地面间动摩擦因数
。另有一光滑绝缘不带电小球Q,质量为
, 以速度
向右运动,与小球P发生弹性正碰,碰撞时间极短,且P、Q间无电荷转移,碰后P球可从
B
点无碰撞进入管道。已知
A
、
B
间距离为4
R
,
重力加速度为
, 不计空气阻力,小球P、Q均可视为质点。求:
(1) 碰后小球P的速度大小
;
(2) 小球P从
A
点运动到管道最高点
C
点过程中电场力做的功
;
(3) 小球P再次到达水平地面时与
B
点的距离。
答案解析
收藏
纠错
+ 选题
关联试题
更多
1
2
3
4
5
下一页
共1000页
跳转











 粤公网安备 44030702000055号
粤公网安备 44030702000055号

 VIP申请
VIP申请
 团体组卷申请
团体组卷申请
