


A.将气垫导轨放在水平桌面上并调至水平;
B.测出挡光条的宽度;
C.分别测出滑块与挡光条的总质量及托盘与砝码的总质量
;
D.将滑块移至图示位置,测出挡光条到光电门![]() 距离
距离;
E.由静止释放滑块,读出挡光条通过光电门的时间;
F.改变挡光条到光电门的距离,重复步骤D、E,测出多组和
。已知重力加速度为
, 请回答下列问题:

A.测出气垫导轨的倾角、弹簧劲度系数
、弹簧原长
、滑块质量
、遮光条宽度
、重力加速度
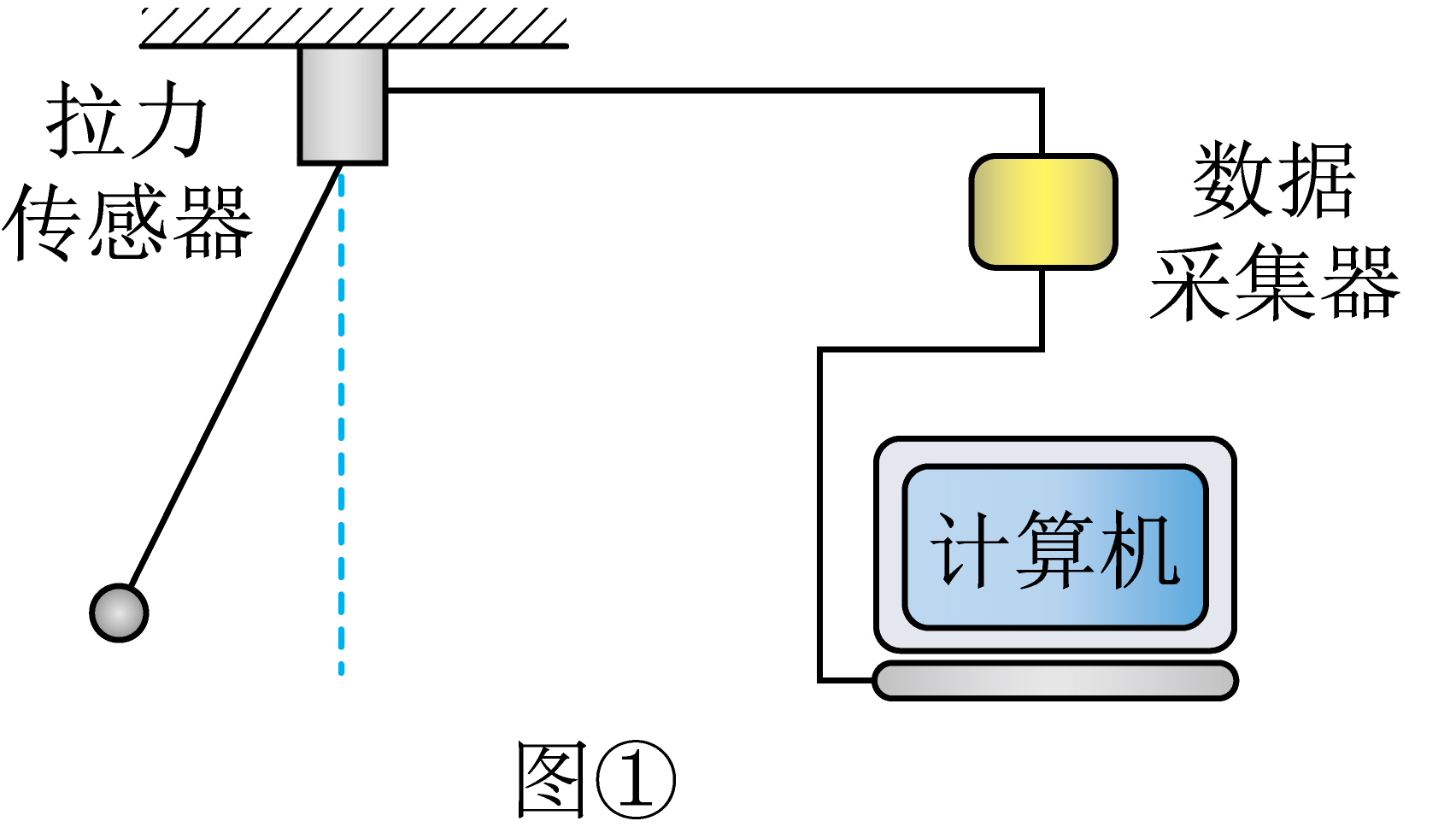
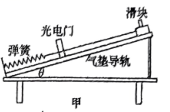
, 按照图甲所示组装好实验装置;
B.将滑块拉至气垫导轨某一位置固定,测出此时滑块上的遮光条到光电门的距离以及弹簧长度
, 要求从此位置释放滑块,可使滑块运动到光电门时细线已经弯曲。
C.由静止释放滑块,滑块在拉力作用下运动,测出滑块上遮光条通过光电门的时间为;
D.将滑块拉至不同的位置,重复B、C步骤多次,并记录每次对应实验数据。
根据所测物理量可以得到每次实验中滑块重力势能、弹性势能、动能之间的关系,从而验证机械能守恒。


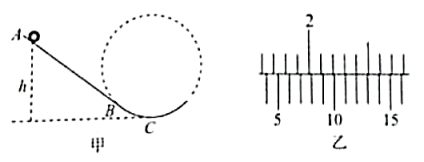
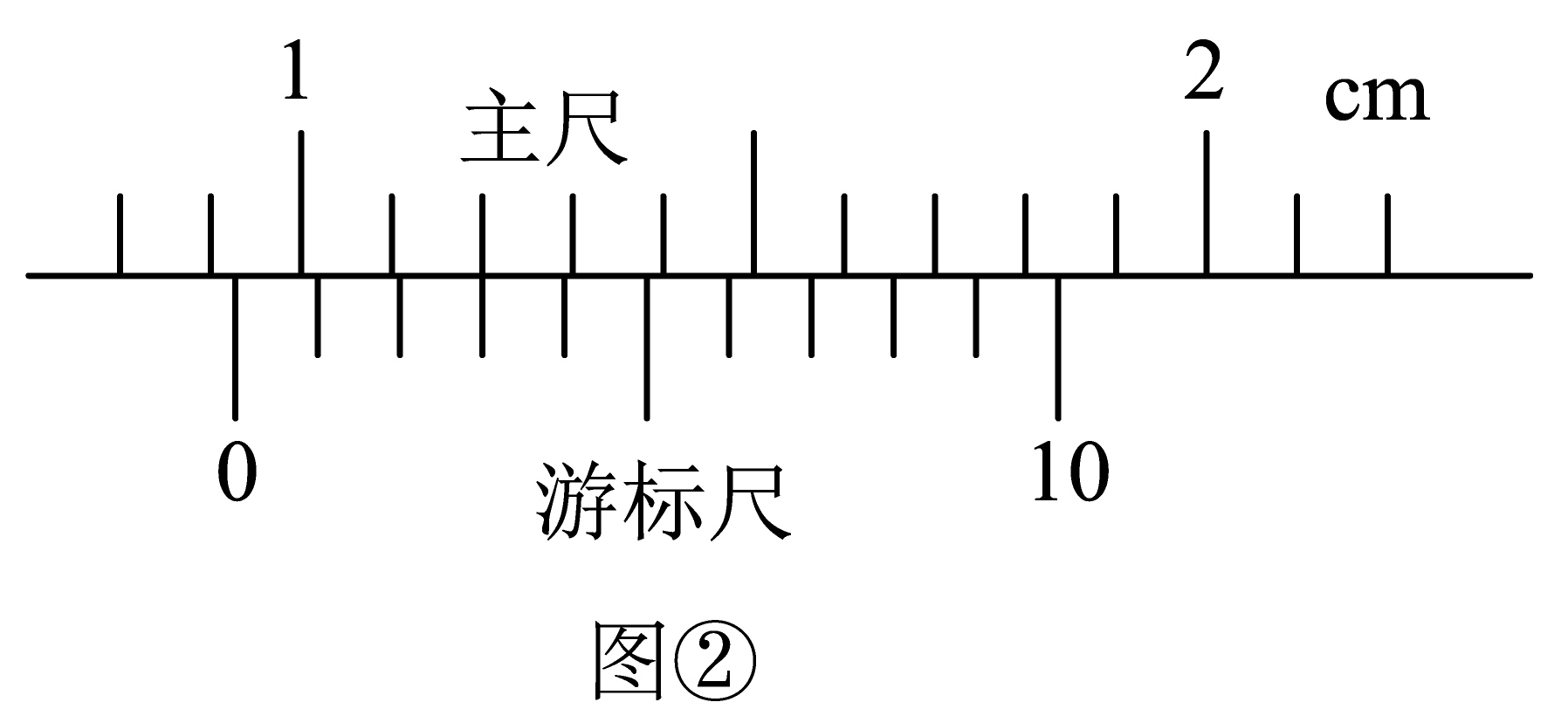
①他用20分度游标卡尺测量小球的直径d , 如图乙所示,则小球直径cm,在C点安装一个光电门;
②将小球从斜面上某点由静止释放,小球通过C点光电门时所用的时间为t , 则小球通过C点时的速度(用物理量符号表示);
③改变小球的释放位置,测得释放位置到C点的高度为h , 重复②,得到多组释放高度h和对应时间t , 以为横坐标,以h为纵坐标,将所得的数据点描点、连线,得到一条直线,若直线的斜率
,则表明小球在上述运动过程中机械能守恒。
①在圆弧最低点C安装一个力传感器;
②将小球从斜面上某点由静止释放,测得释放位置到C点的高度为h , 并测得小球通过C点时传感器的示数F;
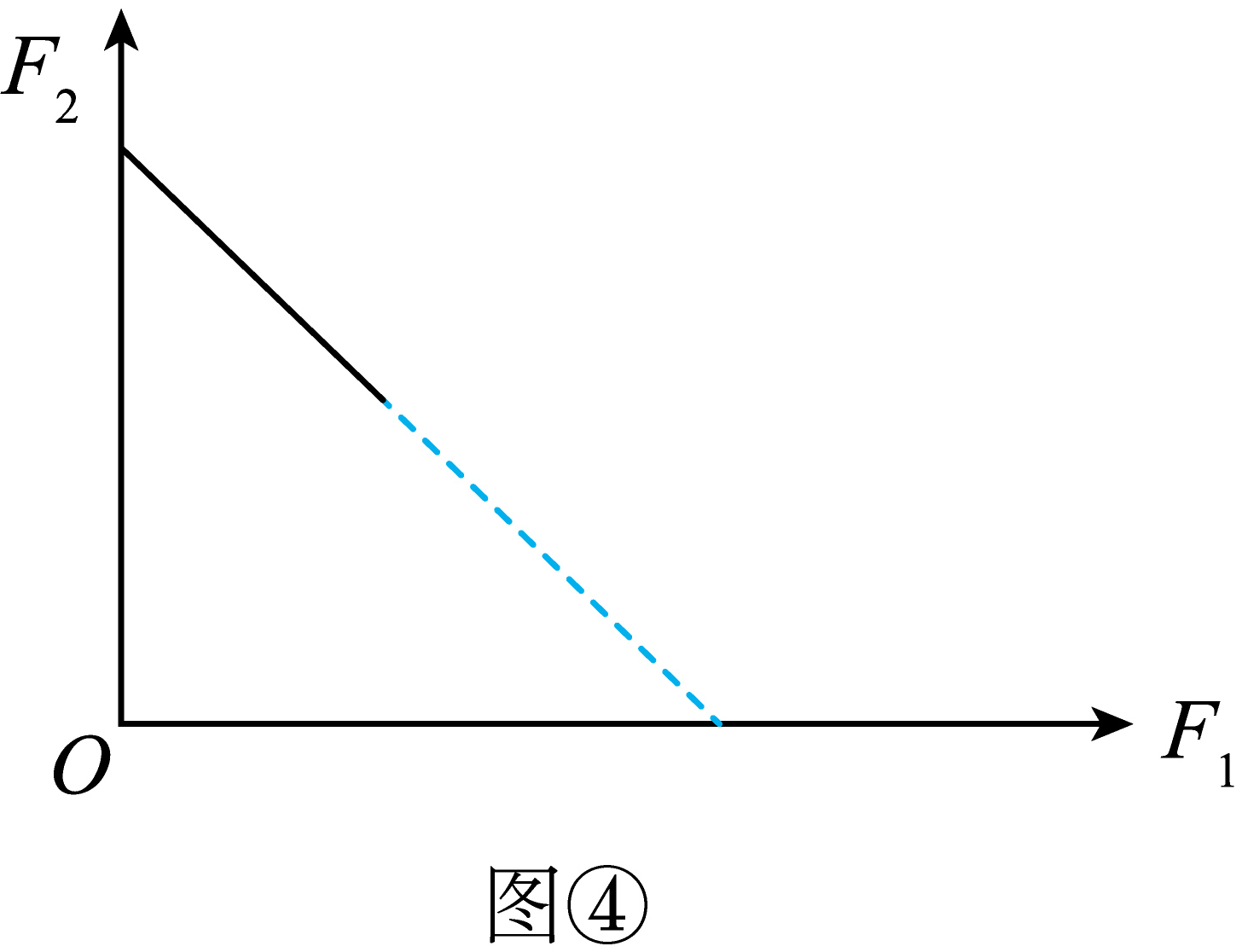
③改变小球的释放位置,重复②,得到多组释放高度h和对应传感器的示数F , 以h为横坐标,以为F纵坐标,将所得的数据点描点、连线,得到一条直线,该直线的斜率为k , 与纵轴的交点为b , 若小球在上述运动过程中机械能守恒,则,
。(用物理量符号表示)。

2006-2024 深圳市二一教育科技有限责任公司 粤ICP备11039084号 粤教信息(2013)2号
 粤公网安备 44030702000055号
粤公网安备 44030702000055号
邮编:518000 地址:深圳市龙岗区横岗街道横岗社区力嘉路108号B栋B6

 VIP申请
VIP申请
 团体组卷申请
团体组卷申请


