


物距/cm | 60.0 | 50.0 | 30.0 | 20.0 | 18.0 | 15.0 |
像距/cm | 12.0 | 12.5 | 15.0 | 20.0 | 22.5 | 30.0 |
像高/cm | 2.4 | 3.0 | 6.0 | 12.0 | 24.0 |

小陈同学经过多次实验得到部分成实像时物距、像距和像高的数据,分析数据凸透镜成放大实像时,像距(选填“大于”“小于”或“等于”)物距,小陈同学使用的凸透镜的焦距为cm。思考后他还从中发现其他一些规律,物距为18.0cm时,像高为cm。

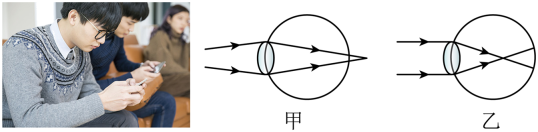
图甲是我国研制的某款智能防疫机器人,具有自主测温、移动、避障等功能.机器人利用镜头中的菲涅尔透镜将人体辐射的红外线聚集到探测器上,通过处理系统转变为热图像,实现对人群的体温检测.当发现超温人员,系统会自动语音报警,并在显示屏上用红色框标注人的脸部.机器人利用磁敏电阻等器件来监控移动速度,控制驱动电机运转,图乙为控制电机运转的原理电路,U为输入电压,为磁敏电阻,阻值随外加磁场强弱的变化而改变.机器人为有效避障,在移动过程中会发射、接收超声波(或电磁波)来侦测障碍物信息,当感知到前方障碍物时,机器人依靠减速器进行减速,并重新规划行驶路线.

 雨后彩虹
B .
雨后彩虹
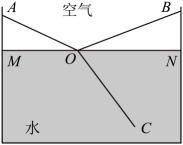
B .  水面“折”枝
C .
水面“折”枝
C .  水中月亮的倒影
D .
水中月亮的倒影
D .  皮影戏
皮影戏
2006-2024 深圳市二一教育科技有限责任公司 粤ICP备11039084号 粤教信息(2013)2号
 粤公网安备 44030702000055号
粤公网安备 44030702000055号
邮编:518000 地址:深圳市龙岗区横岗街道横岗社区力嘉路108号B栋B6

 VIP申请
VIP申请
 团体组卷申请
团体组卷申请
