二一教育旗下产品
网站首页
帮助中心
视频帮助
购买服务
VIP服务
团体组卷服务
激活VIP
旗下产品
21世纪教育网
校网通
校本资源库
数字化校园
二一排课
二一书城
二一阅卷
二一在线备课
二一教育众包网
登录
注册
试题
试卷
试题
领取新人礼包
试卷征集
VIP申请
团体组卷申请
高中通用技术
小学
语文
数学
英语
科学
道德与法治
初中
语文
数学
英语
科学
物理
化学
历史
道德与法治
地理
生物学
信息技术
历史与社会(人文地理)
社会法治
高中
语文
数学
英语
物理
化学
历史
思想政治
地理
生物学
信息技术
通用技术
首页
章节选题
知识点选题
智能组卷
章节智能组卷
知识点智能组卷
细目表组卷
试卷库
同步专区
备考专区
高考专区
专题特供
校本题库
当前位置:
手动组卷
/
高中通用技术
/
按知识点
选择知识点
最新上传
最多使用
过滤已用
过滤组卷已使用过的试题
过滤无解析试题
+ 选择本页全部试题
共计
--
道题
1.
(2024·浙江)
如图所示的智能出纸机,包含红外感应出纸子系统、纸张定长子系统和纸张切断子系统等,其工作过程:通过出纸长度调节键设定好所需的出纸长度,当手掌置于出纸机的出纸端口处,红外线感应到手掌立刻反射到红外接收装置,红外接收装置将信息发送给单片机,单片机启动并控制传送带运行速度和时间,进而控制纸巾下落的长度,当纸巾下落到设定长度时传送带停止运行,此时启动刀片,将纸巾切断,使用者无须触碰纸巾便可取到。请根据示意图及其描述,完成小题。
(1) 下列关于该智能出纸机系统的分析中,不恰当的是( )
(2) 下列关于纸张定长子系统的分析中,合理的是( )
答案解析
收藏
纠错
+ 选题
1.
(2024高三下·宁波月考)
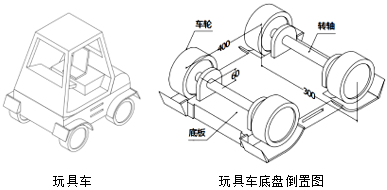
如图所示是小明设计的一辆玩具车,用软件进行仿真测试时发现该玩具车需要拖动才能行驶。于是小明想改 进这辆玩具车, 通过电机驱动联动机构带动车轮,使玩具车在平地上直线行驶。请你帮助小明设计该装置,要求如下:
(a)玩具车能实现自动直行;
(b)玩具车在水平直行或上下坡过程中,平稳可靠;
(c)采用一个电机驱动;
(d)装置主体安装在底板上,具体安装形式可根据工作方式自行确定。
请完成以下任务:
(1) 自动直行玩具车的控制方式属于
(A .开环控制;B .闭环控制);
(2) 在头脑中构思符合设计要求的多个方案, 画出其中最优方案的设计草图(装置安装涉及的底板用线条表示,电机用方框表示),简要说明方案的工作过程;
(3) 在草图上标注主要尺寸。
答案解析
收藏
纠错
+ 选题
1.
(2024·模拟)
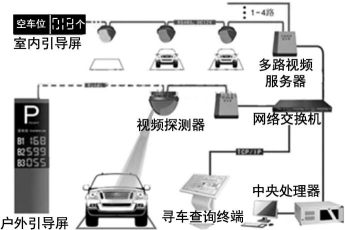
一个全视频车位引导系统如图所示,视频探测器集成视频摄像头以及车位状态指示灯,安装于车位前方,与多路视频服务器配合,通过车位状态模式识别算法实现实时车位状态判断,同时通过智能车牌视频识别算法对车位中的车辆进行车牌定位及车牌识别,并控制车位指示灯显示车位状态。中央控制器是整个智能车位引导系统的采集与控制中心,通过对车位引导屏实时数据的更新,将各区域剩余空车位数量发送至所关联的车位引导屏,引导车主快速找到空车位。据此请完成小题。
(1) 下面关于全视频车位引导系统的说法正确的是( )
(2) 对于全视频车位引导系统中有关控制的说法不正确的是( )
答案解析
收藏
纠错
+ 选题
1.
(2024·模拟)
一款自动洗碗机如图所示,可一次性洗20多个碗碟,具有清洗、烘干和消毒等功能。往箱体内放入碗碟时需先按下箱体盖解锁按钮,按自动开始按钮则能启动定时器进行定时清洗、烘干和消毒。请回答小题。
(1) 从系统的角度分析该自动洗碗机,下列说法恰当的是( )
(2) 从控制系统的角度分析,下列对烘干控制子系统的说法不恰当的是( )
答案解析
收藏
纠错
+ 选题
1.
(2024高三上·模拟)
某商场门口的电动液压升降柱如图所示,通过升降柱来限制车辆,从而保障交通秩序以及场所安全。电动液压升降柱由升降柱柱体、液压传动站、自动检控器三部分共同组成。升降柱控制系统可遥控,也可自动识别,其中自动识别控制过程如下:当汽车靠近时,由车牌识别器识别车牌信息并传递给计算机,计算机控制小型大扭矩电机带动液压杠中的活塞上下运动,从而实现升降柱体的上升和下降。请根据以上材料完成小题。
(1) 从系统的角度分析,下列说法不恰当的是( )
(2) 关于该升降柱控制系统的说法错误的是( )
答案解析
收藏
纠错
+ 选题
1.
(2024·会考)
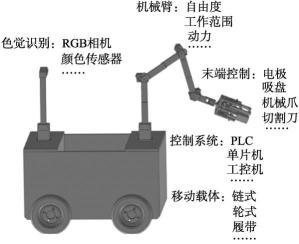
如图所示的温室大棚中种植的西红柿,小明团队决定设计一个果树收摘机器人,帮助果农解决果树采摘难题。小明团队进行了调查、统计、分析,提出了初步设计方案:果树收摘机器人由视觉识别系统、移动载体、机械臂、控制系统及末端执行装置5部分组成;机械臂为3自由度;视觉传感器采用RGB相机,安装于后方;末端控制器由舵机和电机控制,当末端控制器夹住果实后,由安装在一侧的切割刀具切割果柄;控制系统采用PLC。请回答小题。
(1) 下列关于该系统设计的分析不正确的是( )
(2) 从控制系统的角度分析,下列有关该果树收摘机器人的说法不恰当的是( )
答案解析
收藏
纠错
+ 选题
1.
(2024高三上·浙江期末)
如图a所示,这是一款水幕秋千,荡秋千的人经过横梁下方时,水幕会停止喷水,图b是其示意图。其工作过程如下:开始荡秋千时,PLC 控制器根据动感传感器检测到的前2个周期数据,计算出幕喷水与停喷的对应角度(图b中α角),发送指令至控制电路,实现对电磁阀开或闭的控制。 请根据图示和描述,完成小题。
(1) 关于该水幕秋千系统,下列分析中正确的是( )
(2) 下列关于水幕控制子系统的分析中正确的是( )
答案解析
收藏
纠错
+ 选题
1.
(2024高三上·长寿期末)
如图所示汽车防撞预警系统是基于智能分析处理的汽车防撞预警系统,帮助司机与前方车辆保持安全距离。当与前车达到危险距离后,系统以声音警报的方式提醒司机有可能发生追尾碰撞,可有效提高行车安全及降低交通事故的发生,减少人员和经济损失。下列关于防撞预警系统的说法中,正确的是( )
A .
该系统属于闭环控制系统
B .
被控对象是前方障碍物
C .
雨雾天气是该控制系统的干扰因素
D .
输入量是驾驶者的刹车动作
答案解析
收藏
纠错
+ 选题
1.
(2024高三上·长寿期末)
如图所示是小斌在老师指导下设计的一款智能浇花控制系统示意图。当传感器检测到花盆土壤湿度低于设定下限值时,水泵抽取水箱中的水,对花盆浇水;当花盆土壤湿度达到设定的上限值时,断开水泵电源,停止浇水;为防止水箱缺水而水泵电机长时间空转烧毁,该系统还设置了电机保护子系统:当水箱水位过低时,自动切断水泵电源,保护电机。请根据示意图和描述,完成以下任务。
(1) 该系统的花盆土壤湿度和电机保护控制系统的控制方式分别属于
和
(均在“A .开环;B .闭环”中选择合适的选项,将序号填写在横线处)控制;
(2) 该电机保护子系统的被控对象是
(在“A .水泵电机;B .水箱;C .水箱的水位;D .土壤”中选择合适的选项,将序号填写在横线处);
(3) 该电机保护子系统中的传感器最好选用
;(在“A .磁敏传感器;B .湿度传感器;C .水位传感器”中选择合适的选项,将序号填写在横线处);
(4) 小斌为了对系统进行环保优化,采用了静音水泵电机属于
(在“A .影响因素;B .干扰因素;C .约束条件”中选择合适的选项,将序号填入横线处)。
答案解析
收藏
纠错
+ 选题
1.
(2024·浙江)
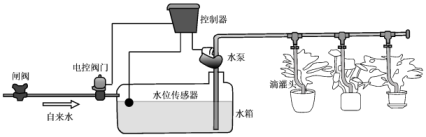
小明在通用技术实践课上设计制作了植物定时浇水控制装置。使用中发现需要人工向水箱中加水,小明想增加自动补水控制子系统(如图所示),实现全自动浇水。控制器分别控制水泵和电控阀门,浇水时启动水泵抽水,当水位下降到下限时,打开电控阀门,向水箱补充自来水,当水位上升到上限时,关闭电控阀门。请根据题图及其描述完成以下任务:
(1) 原系统中浇水的控制方式属于
(A .开环控制;B .闭环控制);
(2) 小明在该系统的改进设计中明确的问题是(单选)_____;
(3) 小明设计补水控制子系统时进行了以下分析,其中不恰当的是(单选)_____;
(4) 请根据题图及其描述填写补水控制子系统方框图(填写文字,全对得分)
答案解析
收藏
纠错
+ 选题
关联试题
更多
1
2
3
4
5
下一页
共91页
跳转






 粤公网安备 44030702000055号
粤公网安备 44030702000055号

 VIP申请
VIP申请
 团体组卷申请
团体组卷申请